
Capítulo 1 - Explicación

CONTEXTO
Análisis termográficos con Vehículos Aéreos no Tripulados para el monitoreo de vertederos.
El propósito del análisis ambiental de vertederos, sitios de potencial contaminación, es obtener información que identifica la presencia de cualquier substancia tóxica producida en el cuerpo del vertedero como algún lixiviado o un biogás y su impacto en el entorno. La extensión del impacto de estos fluidos se vincula con el tipo de residuo depositado y el grado de estabilidad del propio residuo, esto último dependiente del tiempo transcurrido desde su deposición y las condiciones ambientales de la acumulación (temperatura, grado de humedad, etc.). La información obtenida con métodos tradicionales es generalmente puntual, ya que está limitada a una serie de muestras. Una posibilidad de obtener información diseminada por toda el área de estudio se ofrece a partir del uso de técnicas de teledetección y en particular a partir de la teledetección aérea. En el estudio de un vertedero a través de teledetección área, la fuente de energía puede ser el sol (teledetección pasiva) y/o el calor desprendido en procesos de degradación de materia orgánica depositada (teledetección activa). En particular, en este contexto, las técnicas termográficas son efectivas en términos de análisis, dado que la degradación de los residuos genera calor que puede ser transmitido en distintos grados a través del “techo” del vertedero. Las medidas radiométricas por infrarrojos permiten destacar de forma rápida y precisa la presencia de anomalías térmicas en la estructura del vertedero, localizando áreas que podrían estar caracterizadas por sus altas emisiones de biogás o atravesadas por fluidos contaminados. Tanto el biogás como los lixiviados tienen un comportamiento térmico diferente comparado con el suelo circundante y pueden ser por tanto identificados y caracterizados fácilmente. Esto significa que las medidas termográficas se deben tomar en condiciones donde no exista radiación solar usando un canal adecuado para obtener el máximo contraste térmico posible a temperatura ambiente. Cabe destacar que la investigación termográfica permite extraer información que puede mejorar el conocimiento de las emisiones generales, lo que facilita una herramienta para la correcta gestión y análisis en detalle del terreno.
El vertedero investigado se localiza al suroeste de la ciudad de Chiogga (VE). El área cubre aproximadamente 6 hectáreas y tiene una superficie irregular cubierta con vegetación espontánea.
Instrumentos usados para los muestreos fotogramétricos (RGB e IR) con Vehículos Áreas No Tripulados (VANT).
La adquisición de las imágenes necesarias para la producción de ortofotos RGB e IR proviene de:
- Un muestreo fotogramétrico con una cámara digital RGB montada sobre un VANT.
- Un muestreo con una cámara termoradiométrica montada sobre un VANT.
- Un muestreo RTK con un receptor GPS.
Durante el muestreo se usó el siguiente equipo:
- Drone DJI Matrix 600;
- Cámara Zenmuse X5 para muestreo fotogramétrico RGB;
- Cámara Zenmuse XT radiometric thermal imaging;
- Objetivo para visualizer las fotos de los puntos detectados por receptores GPS / GNSS
- Topcon Hyper Pro dual constellation receptor GPS |

UAV Matrice 600 PRO
Resolución del sensor: 16 MP.
 Tipo de sensor: CMOS
Tipo de sensor: CMOS
Tamaño del sensor: 17.3 × 13 mm.
Tamaño del pixel: 3.75 μm
Distancia focal equivalente: 30 mm
FOV w: 59.9 °
FOV h: 46.9 °
FOV diagonal 72 °
Fotocamera DJI Zenmuse X5

Termocamera DJI Zenmuse XT
Distancia focal: 13mm
Resolución del sensor: 640x512 mm
Tamaño del pixel: l 17μm.
Sensibilidad <50 mK.
3-axis Gimbal incorporado con el propio sensor, plug-play

Un receptor Topcon HiPer Pro GPS se usó para el muestreo topográfico.
Diseño
La etapa de diseño de un muestro por VANT se ejecuta antes del vuelo y se suele llevar a cabo en la oficina consultado mapas aeronáuticos. Todos los datos técnicos de la misión deben ser determinados a priori ya que tanto la altura del vuelo, la velocidad de avance y el solape lateral y frontal de las imágenes obtenidas debe ser correctamente ponderado para predecir como será el resultado final.
Usando el software específico, por tanto, se preparan los planes de vuelo, los cuales están unidos a aspectos fundamentales derivados del tipo de adquisición que se pretende llevar a cabo y del tipo de medio que se pretende usar.
Estos parámetros son:
- Solape frontal: porcentaje de solape entre dos imágenes consecutivas.
- Solape lateral: porcentaje de solape entre dos imágenes una junto a otra.
- Tiempo de vuelo: tiempo de vuelo máximo, lo que está limitado por las baterías instaladas y las características del sistema de pilotaje remoto.
- Velocidad del vuelo: movimiento del VANT (típicamente en m/s), lo que depende del tipo de adquisición que realiza el sensor. De media, para imágenes radiométricas en RGB se utilizan rangos entre 3 y 5 m/s, mientras que para otros tipos de relieve, en especial para térmicas, las velocidades son bastante más bajas.
- Altitud de vuelo: la altura a la que la plataforma aérea operará. Este parámetro es fundamental para obtener la distancia de muestro respecto al suelo, lo que permite calcular el tamaño del pixel, normalmente expresado en cm. Se calcula mediante un sensor instalado en el VANT y por su distancia focal.
Para el diseño de vuelos, se usó DJI GroundStation PRO (Fig. 5) y DJO GO, totalmente compatibles con el UAV Matrix 600 y los sensores Zenmuse X5 and XT. En el caso del uso del XT termal, que se caracteriza por una baja resolución espacial de 640x512, se necesita tener un gran solape para obtener las ortofotos durante la fase del procesado.
Para este ejercicio, solo se usarán las imágenes relativas a una porción del área de estudio, específicamente su parte norte.
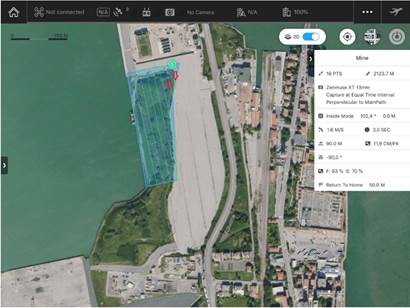
Área tomada en consideración cubierta vista en GroundStation PRO
Procesado de imágenes.
El procesado de imágenes se llevo a cabo con el software comercial distribuido por Agisoft llamado Photoscan Professional. QGIS se usó posteriormente para visualizar los resultados. El flujo de trabajo y el software se divide en la siguientes fases:
a) subida de imágenes a Photoscan Pro (Metashape)
b) comprobación de las imágenes subidas y el borrado de las innecesarias
c) alineación de las imágenes
d) construcción de la densa nube de puntos
e) construcción de la malla
f) creación de la textura
g) construcción del modelo de tiles (baldosas)
h) construcción del Modelo Digital de Elevaciones (MDE)
i) generación de la ortofoto
j) exportación de los resultados
Una vez las imágenes están cargadas, la alineación y la creación de la nube de puntos puede comenzar. Entre estos dos pasos el se introdujo los GCPs y se optimizó las cámaras “optimize cameras” para actualizar la nube de puntos generadas en la alineación inicial con el nuevo sistema de referencia. A continuación, a partir de la nube de puntos, se crea un MDE y el software modela la ortofoto a partir de él. La generación de ortofotos tanto para el infrarrojo próximo como para las bandas RGB sigue el mismo procedimiento.
1. RGB
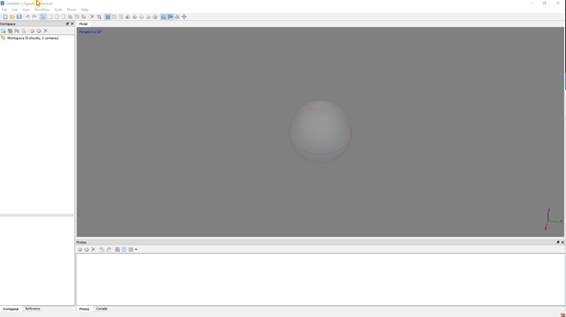
Primero, necesitarás el software Agisoft Photoscan. Una vez abierto, hay tres diferentes zonas. La parte central visualiza los datos en un modelo 3D. En la parte izquierda está la tabla de trabajo con todos los resultados de tu trabajo. En la parte inferior se muestran las imágenes visualizadas o sus características.
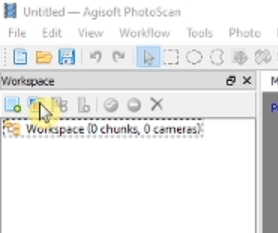
Carga las imágenes de la carpeta RGB al programa con el segundo icono de la sección del área de trabajo.
Puedes ver las imágenes en la parte inferior y también su posición estimada en el modelo 3D.
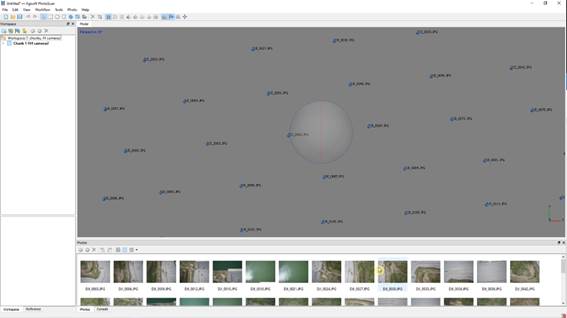
Ahora necesitas alinear estas imágenes con el programa para asegurarte que se solapan correctamente y te permitan crear el modelo 3D.
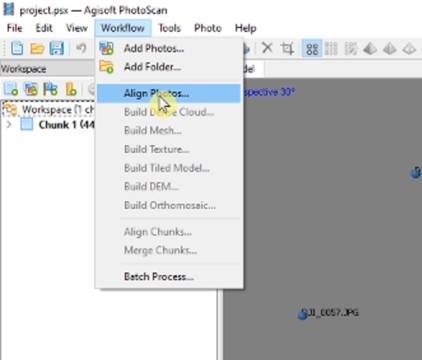
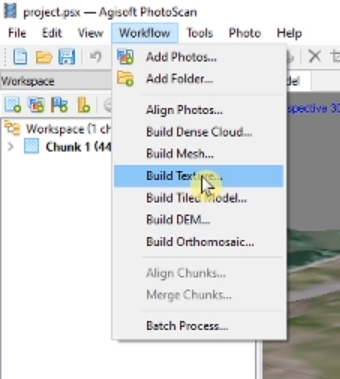
En el menú del workflow selecciona “Align photos”.
Modifica las características. Debería ser “Low accuracy” y desactivar (disabled) “Pair preselection”. También, en la “advanced section”, debes establecer un “key point limit” de 40.000 y un “tie point limit” de 4.000. Confirma.

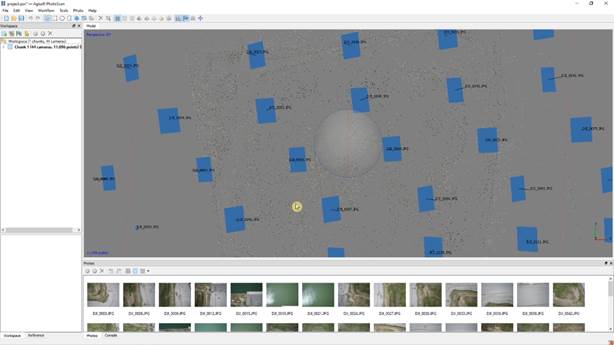
Como resultado encontraras muchos puntos en la sección del modelo con la posición precisa y la orientación de la cámara.
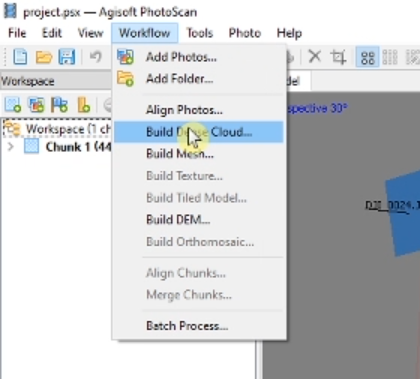
En el menu “workflow” se han activado nuevos comandos. Selecciona “Build Dense Cloud”.
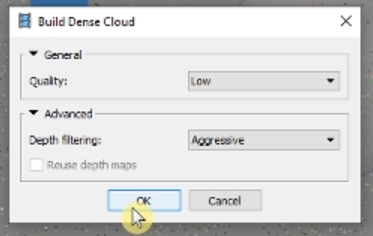
Selecciona “low quality” y “aggressive depth filtering”
Aparecen los puntos en el modelo en forma de nube. Con la bola transparente en el medio de la visualización puedes mover y rotar la escena usando tres ejes.

En el siguiente paso tienes que procesar la construcción de la malla “build mesh”.

Para ser específico, selecciona “Arbitrary Surface type”, “dense cloud” como “source data” y “low” como “fase count. La interpoalción debería activarse (enabled).
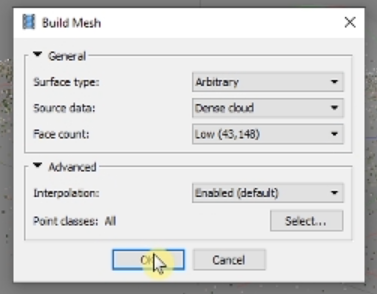
El resultado ya se parece a una superficie continua.
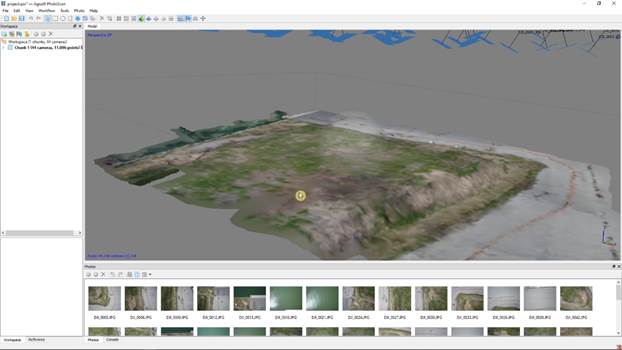
Ahora, para mejorar el modelo, construye la textura en el menú “workflow”
Mantén los valores predeterminados.

Ahora la textura del modelo es muy detallada.
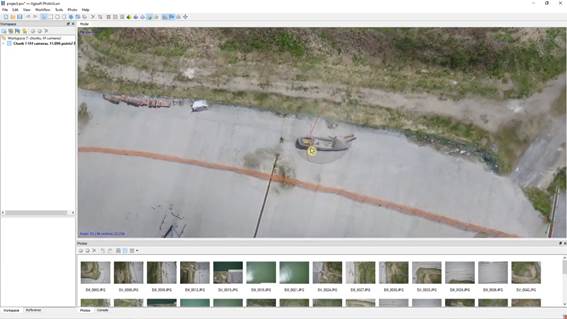
Es el momento de seguir el proceso y construir el modelo de tiles (build tiled model).

Cambia el tamaño del pixel a 0.05m.

A primera vista nada ha cambiado. Has hecho un primer paso para crear el modelo digital de elevaciones.
Ahora selecciona “build DEM” en el menú “workflow”
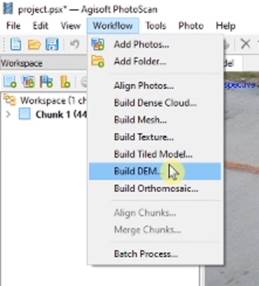
Mantén toda la información como predeterminada y asegúrate que la fuente de datos es “dense cloud”. Puedes cambiar el Sistema de coordenadas si es necesario.

En el “workspace” puedes comprobar todos los productos de procesos previos.
Con un click derecho en el DEM (MDE) lo puedes exportar como un TIFF.

También con la serie de iconos puedes cambiar la visualización del modelo.

El último paso del proceso de trabajo es “Build Orthomosaic”, que lo puedes encontrar en el menú “workflow”
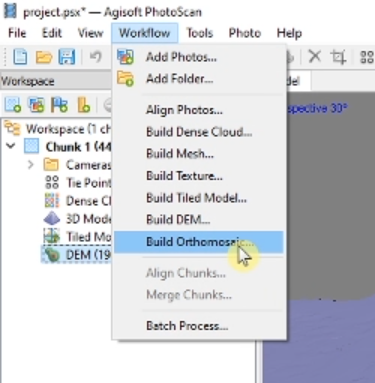
Mantén los ajustes como predeterminados

Ahora deberías exportar también el ortomosaico como TIFF.

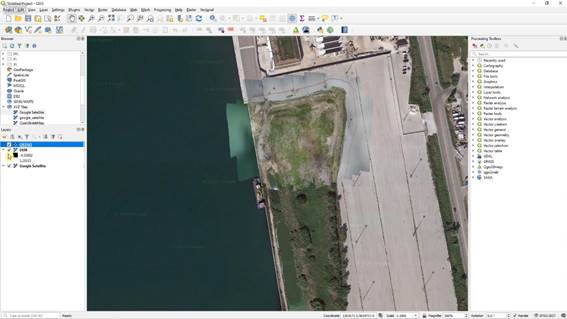
Si cargas el ortomosaico exportado en QGIS con una “Google satellite XYZ tiles connection”, puedes comprobar que encaja perfectamente.
Continua… Módulo 4 – Capítulo 2